MC600

中空手腕结构
- 实现电缆、软管的小型化以及轻松排线
- 提高附带电缆、软管的可靠性
手腕有力
- 通过较大的手腕扭矩,可对应大型喷枪机械手、大型工件机械手
- 强劲的手腕扭矩(NACHI以往机型1.8倍的手腕能力)
高速动作
- 更高速度的动作性能,提高生产效率
提高适用性
- 通过扩大动作范围,还能够轻松置换现有设备
用于搬运的信号线等是标准装备
- 空气2系统、信号线40芯、DeviceNet电缆、LAN电缆
本体规格
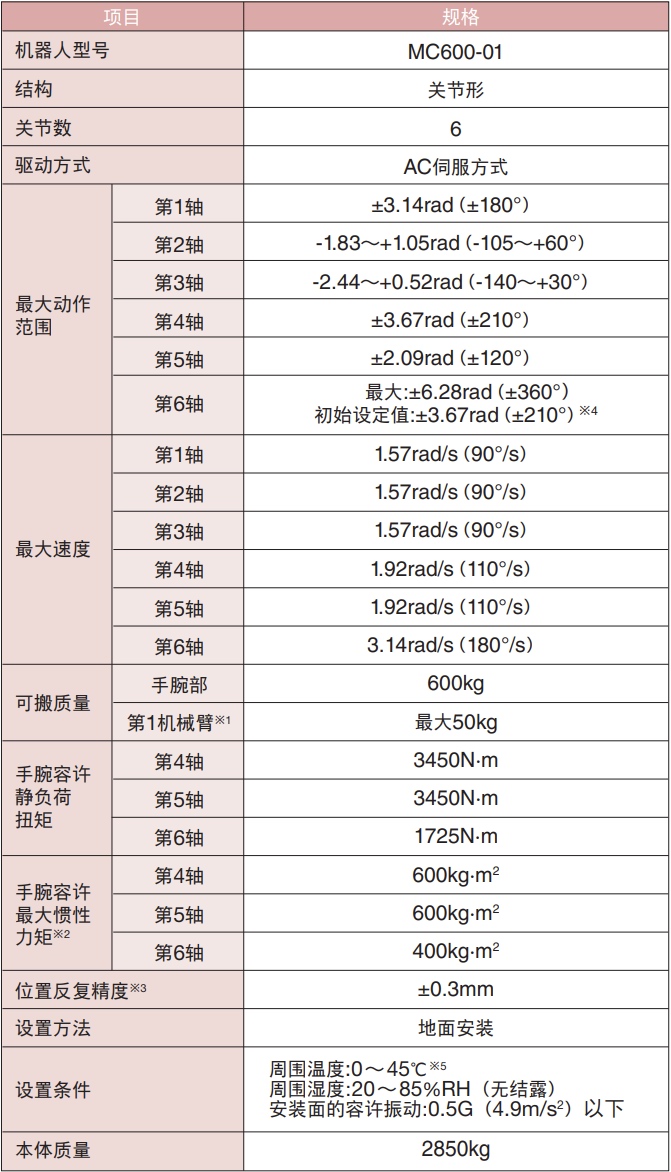
1[rad] = 180/π[°], 1[N·m] = 1/9.8[kgf·m]
※ 在控制器画面中,第1轴~第6轴分别显示为J1~J6。
※ 不具备防爆功能。
※1: 第1机械臂上负荷会根据安装位置、手腕负荷重量而变化。
※2: 手腕容许惯性力矩可能因手腕的负荷条件而有差异,请注意。
※3: 依据“JIS B 8432”。
※4: 初始设定时,设定为±210°。要将电缆通入第6轴中空部时,请在±210°的范围内使用。不通入电缆时,根据使用条件,最大可将动作范围扩大至±360°。
※5: 在海拔1,000m以下使用。超过容许高度时,周围温度受到限制。
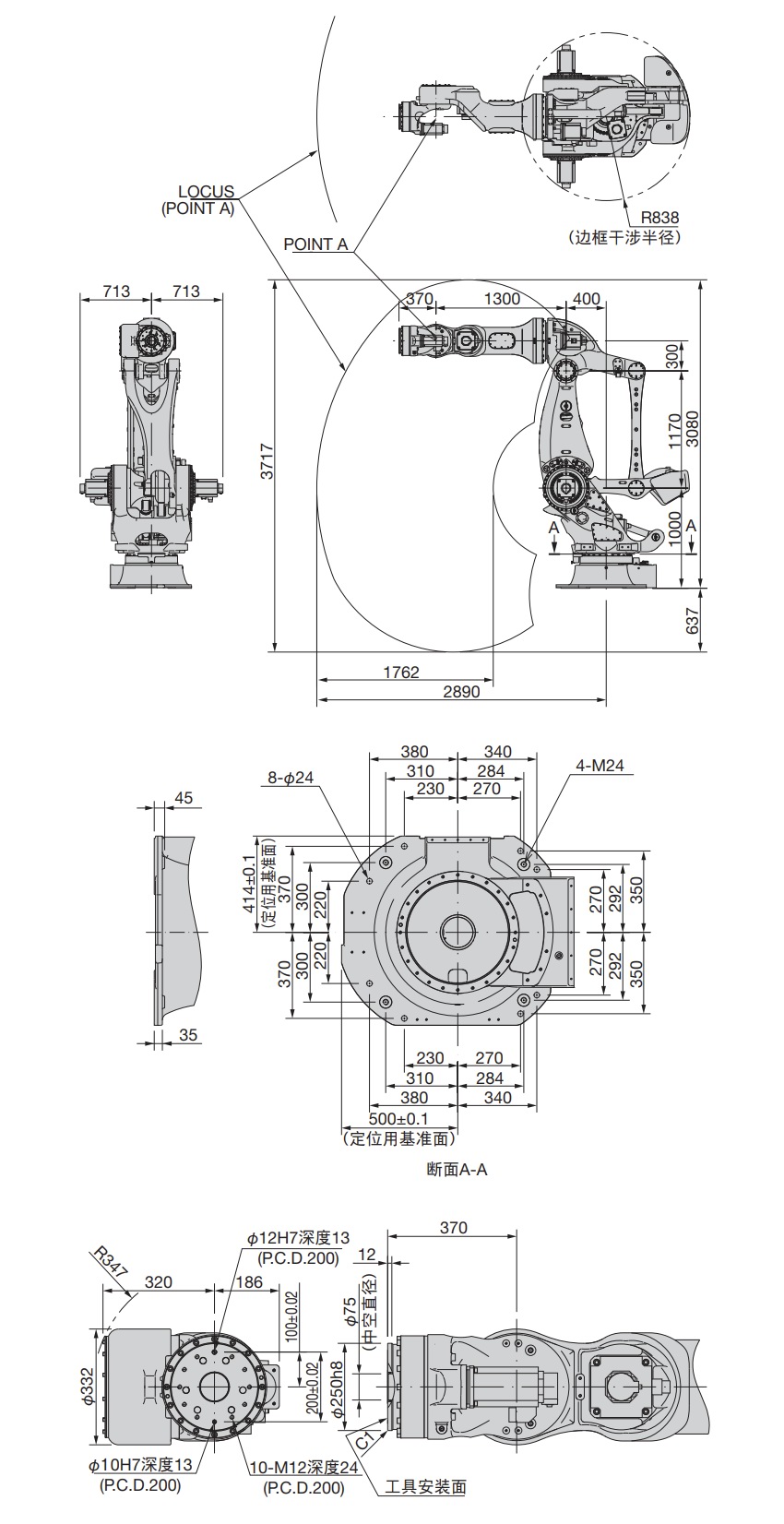
外形尺寸及动作范围
●以上数据均来源于不二越内部实验,于特定测试环境下所得(请见各项具体说明)。
●本产品的额定功率、规格、外部尺寸等如需改良而变更,恕不另行通告。
Previous
