MZ07/MZ03EL

高速动作
更高的速度规格,为提高生产率做出贡献。
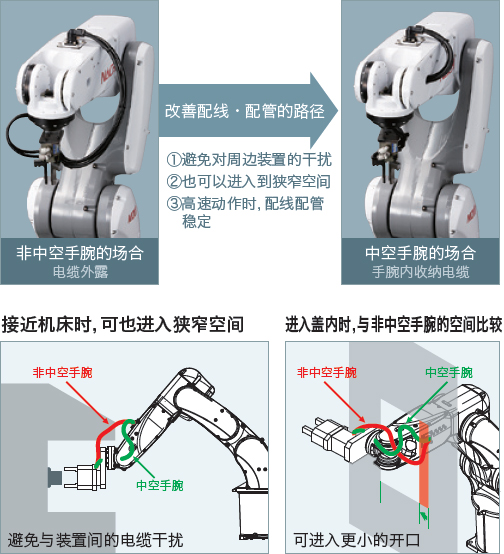
配线内置于中空手腕
减少与配线周边设备的干扰风险,适用性得到提升,更容易进入狭小的区域。
丰富的应用程序支持
除标准规格之外,另有视觉规格,追加轴规格和力传感器规格,可满足生产现场的各类需求。
性能
高速性能
各轴的最高速度优于NACHI同级别旧机型;
缩短了作业的节拍时间,从而提高了生产效率。
标准节拍时间(往返动作)*1
(*1) 负载为1kg时的标准节拍。根据机器人程序,设置条件等也会相应变化。
各轴的最高速度
| 轴 | MZ07-01 | 旧机型 |
|---|---|---|
| J1 | 450°/s | 263°/s |
| J2 | 380°/s | 240°/s |
| J3 | 520°/s | 300°/s |
| J4 | 550°/s | 300°/s |
| J5 | 550°/s | 300°/s |
| J6 | 1000°/s | 480°/s |
巧妙的电缆布线
在中空手腕内抓手用的配线,配管可有序的收纳。
工作范围
MZ07/07L 外形尺寸及动作范围
预留接口
手腕部详细尺寸
安装
MZ03EL 外形尺寸及动作范围
手腕部详细尺寸
安装
规格
| 机器人型号 | MZ07-01 (MZ07P-01) | MZ07L-01 (MZ07LP-01) | MZ03EL-01 | |||
|---|---|---|---|---|---|---|
| 构造 | 关节型 | |||||
| 关节数 | 6(5) | 6 | ||||
| 驱动方式 | AC伺服方式 | |||||
| 最大 工作范围 | 臂 | J1 | 旋回 | ±2.97rad (±170°) | ||
| J2 | 前后 | -2.36 ~ +1.40rad (-135°~ +80°) | ||||
| J3 | 上下 | -2.37 ~ +4.71rad (-136°~ -270°) | -2.43 ~ +4.71rad (-139°~ -270°) | -2.71 ~ +4.71rad (-155°~ -270°) | ||
| 手腕 | J4*3 | 回转2 | ±3.32rad (±190°) | |||
| J5 | 弯曲 | ±2.09rad (±120°) | ||||
| J6 | 回转1 | ±6.28rad (±360°) | ||||
| 最大速度 | 臂 | J1 | 旋回 | 7.85rad/s (450°/s) | 5.24rad/s (300°/s) | |
| J2 | 前后 | 6.63rad/s (380°/s) | 4.89rad/s (280°/s) | 4.01rad/s (230°/s) | ||
| J3 | 上下 | 9.08rad/s (520°/s) | 6.28rad/s (360°/s) | |||
| 手腕 | J4*3 | 回转2 | 9.60rad/s (550°/s) | |||
| J5 | 弯曲 | 9.60rad/s (550°/s) | ||||
| J6 | 回转1 | 17.5rad/s (1000°/s) | ||||
| 可搬质量 | 手腕部 | 7kg | 3.5kg | |||
| 手腕容许 静负荷扭矩 | J4*3 | 回转2 | 16.6N·m | 6.0N·m | ||
| J5 | 弯曲 | 16.6N·m | 6.0N·m | |||
| J6 | 回转1 | 9.4N·m | 2.9N·m | |||
| 手腕容许 惯性力矩*1 | J4*3 | 回转2 | 0.47kg·m2 | 0.12kg·m2 | ||
| J5 | 弯曲 | 0.47kg·m2 | 0.12kg·m2 | |||
| J6 | 回转1 | 0.15kg·m2 | 0.03kg·m2 | |||
| 位置反复精度 *2 | ±0.02mm | ±0.03mm | ||||
| 周围温度 | 0~45°C | |||||
| 设置条件 | 地面安装, 壁挂安装,悬吊安装,倾斜安装 | |||||
| 本体质量 | 36kg | 38kg | 39kg | |||
| 最大工作半径 | 723mm | 912mm | 1102mm | |||
| 耐环境性 | IP67 (防尘·防滴) | |||||
1[rad]=180/π[°] 1[N・m]=1/9.8[kgf・m]
(*1) 手腕容许惯性力矩因手腕负荷条件而不同,请注意。
(*2) 以JIS B 8432为基准。
(*3) 5轴规格中(MZ07P-01,MZ07LP-01),没有J4轴。
(*4) 一覧表中最大速度为最大值,根据作业程序及手腕负荷条件而变化。
Previous
