LP130/180/210-01

高速码垛
- 搬运130kg物品时,1,500袋/h;
- 搬运60kg物品时,1,800袋/h(均是LP130的情况下)
- 有LP130(可搬130kg),LP180(可搬180kg),LP210(可搬210kg) 这3种型号,灵活地将码垛系统引入。
自由灵活的装载方式
- 可自由配置各种形状和大小的装载物。
- 可通过多种多样的抓手(选装件),实现从小件到大件的各类搬运作业。
节省空间
- 拥有大范围的工作半径的同时有効的控制了干涉空间,实现紧凑且灵活的机体设计。
简单操作
- 初学者也可简单掌握的示教操作。
- 可进行对话型示教。自动生成程序。

可简单操作的码垛功能
- 搭载有仅需输入工件尺寸和选择码垛类型的程序自动生成功能。
- 此外,通过配备“防止重叠放置”和“工件高度调整”功能,使设置和示教变得简单便捷。“工件高度调整”功能是应对袋状物的情况,该件随其自重的不同而厚度将发生变化。
- 通过采用模拟软件“FD on DESK”,可在电脑上编程并可确认码垛状态及周期。
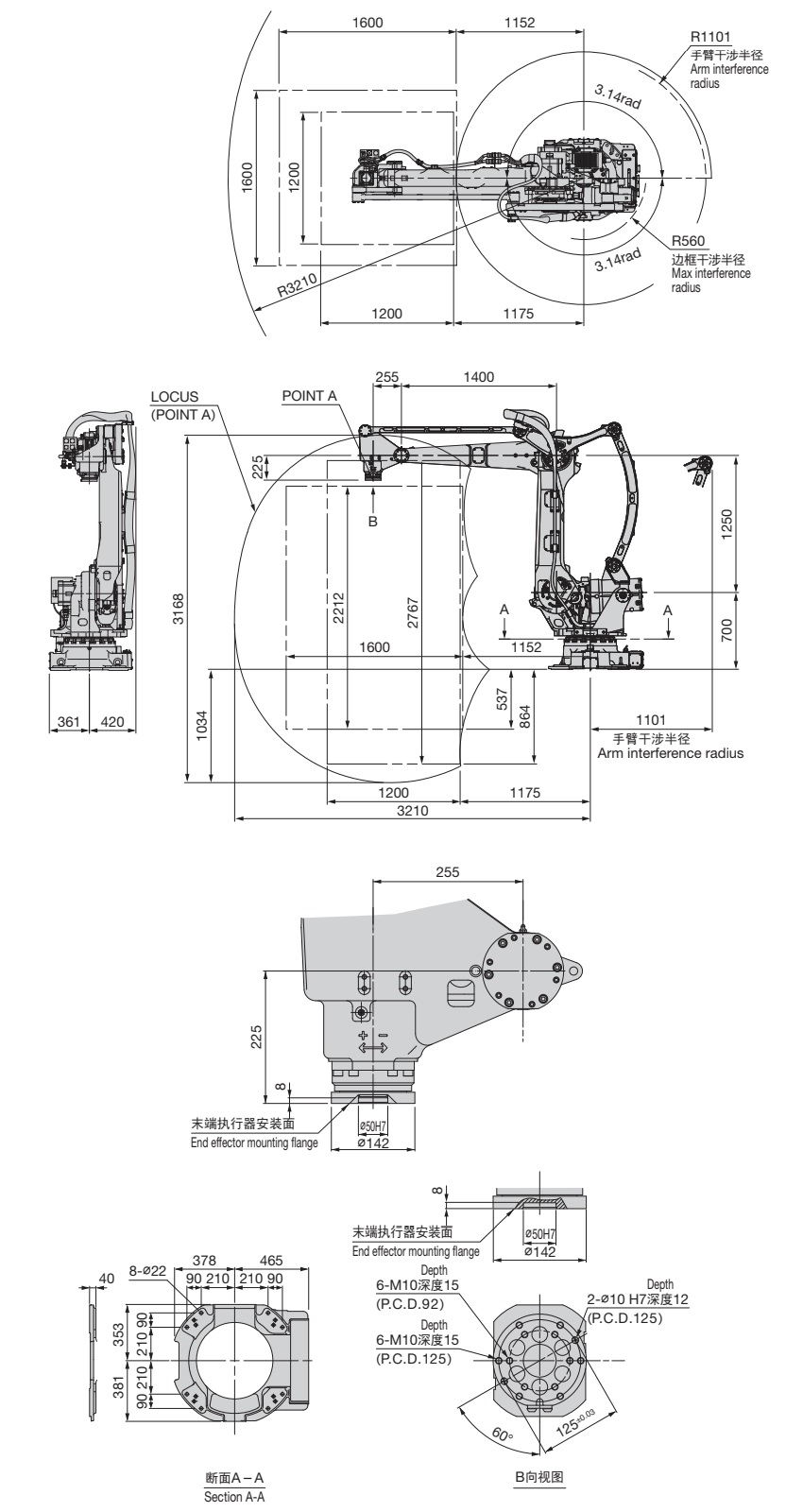
外形尺寸及动作范围
工作范围广且节约空间
拥有最大延伸距离3.2m,货物堆积高度2.7m的广阔工作范围,且旋转(机器人腰部)干涉半径仅为560mm,节约了空间。提高了系统布局的自由度。
●本册中的数据均来源于不二越内部实验,于特定测试环境下所得(请见各项具体说明)
●本产品的额定功率、规格、外部尺寸等如需改良而变更,恕不另行通告。
规格(型号)
本体规格
| 机器人型号 | LP130-01 | LP180-01 | LP210-01 | |
|---|---|---|---|---|
| 结构 | 关节型 | |||
| 关节数 | 4 | |||
| 驱动方式 | AC伺服方式 | |||
| 最大动作范围 | J1 | ±3.14rad | ||
| J2 | +.71~-1.65rad | |||
| J3 | +.30~-2.04rad | |||
| J4 | ±6.28rad | |||
| 最大速度 | J1 | 2.27rad/s | 2.01rad/s | 1.83rad/s |
| J2 | 2.01rad/s | 1.75rad/s | 1.75rad/s | |
| J3 | 2.01rad/s | 1.83rad/s | 1.75rad/s | |
| J4 | 6.98rad/s | 6.28rad/s | 5.24rad/s | |
| 最大可搬质量 | 手腕部 | 130kg | 180kg | 210kg |
| 第1手臂部负荷*1 | 25kg | |||
| 手腕容许 最大惯性力矩 | J4 | 50kg・m2 | 69kg・m2 | 100kg・m2 |
| 位置反复精度*2 | ±0.3mm | ±0.4mm | ||
| 空气软管 | -101.3kPa~690kPa | |||
| 使用空气压力 | 2-φ12x8 (至手腕部) | |||
| 应用程序用信号线 | 20芯(至手腕部) 6芯(至第1手臂部) | |||
| 设置方法 | 地面安装 | |||
| 设置条件 | 周围温度 : 0~45°C | |||
| 本体质量 | 1,150kg | |||
1[rad] = 180/π[°],1[N・m] = 1/9.8[kgf・m]
(*1) 根据安装位置,手腕负荷质量而变化。
(*2) 以JIS B 8432为依据。
Previous
