SRA100B/100J

SRA系列 SRA100B/100J
紧凑×高性能
紧凑
- 紧凑的手臂结构,可进行高密度设置
- 机器人底座宽度 :500mm
- 框架干涉半径 :366mm
高性能
- 高速机器人SRA系列的高速控制
- 实现更高水平的生产效率
充足的搬运能力
- 可搬重量 :100kg
- 手腕扭矩 :580N・m(J4/J5轴)
主体规格
| 机器人型号 | SRA100B-01 | SRA100J-01 | |||
|---|---|---|---|---|---|
| 结构 | 关节型 | ||||
| 关节数 | 6 | ||||
| 驱动方式 | AC伺服方式 | ||||
| 最大动作范围 | 臂 | J1 | 旋回 | ±3.14rad (±180°) | |
| J2 | 前后 | -2.09 ~ +1.05rad (-120°~ +60°) | |||
| J3 | 上下 | -2.62~ +3.14rad (-150°~ +180°) | -2.18 ~ +1.57rad (-125° ~ +90°) | ||
| 手腕 | J4 | 旋转2 | ±6.28rad (±360°) | ||
| J5 | 弯曲 | ±2.36rad (±135°) | |||
| J6 | 旋转1 | ±6.28rad (±360°) | |||
| 最大速度 | 臂 | J1 | 旋回 | 2.37rad/s (136°/s) | |
| J2 | 前后 | 1.92rad/s (110°/s) | 2.01rad/s (115°/s) | ||
| J3 | 上下 | 2.27rad/s (130°/s) | 2.79rad/s (160°/s) | ||
| 手腕 | J4 | 旋转2 | 4.19rad/s (240°/s) | ||
| J5 | 弯曲 | 4.07rad/s (233°/s) | |||
| J6 | 旋转1 | 6.13rad/s (351°/s) | |||
| 可搬质量 | 手腕部 | 100kg | |||
| 手臂上 *1 | 25kg (最大45kg) | ||||
| 手腕容许 静负荷扭矩 | J4 | 旋转2 | 580N·m | ||
| J5 | 弯曲 | 580N·m | |||
| J6 | 旋转1 | 290N·m | |||
手腕容许最大 | J4 | 旋转2 | 45kg·m2 | ||
| J5 | 弯曲 | 45kg·m2 | |||
| J6 | 旋转1 | 22.7kg·m2 | |||
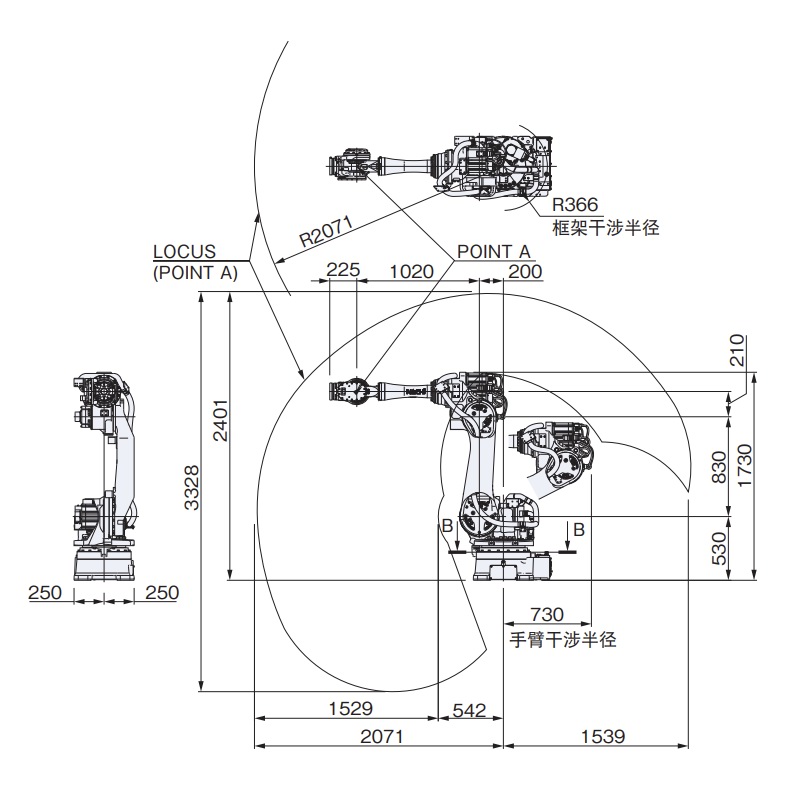
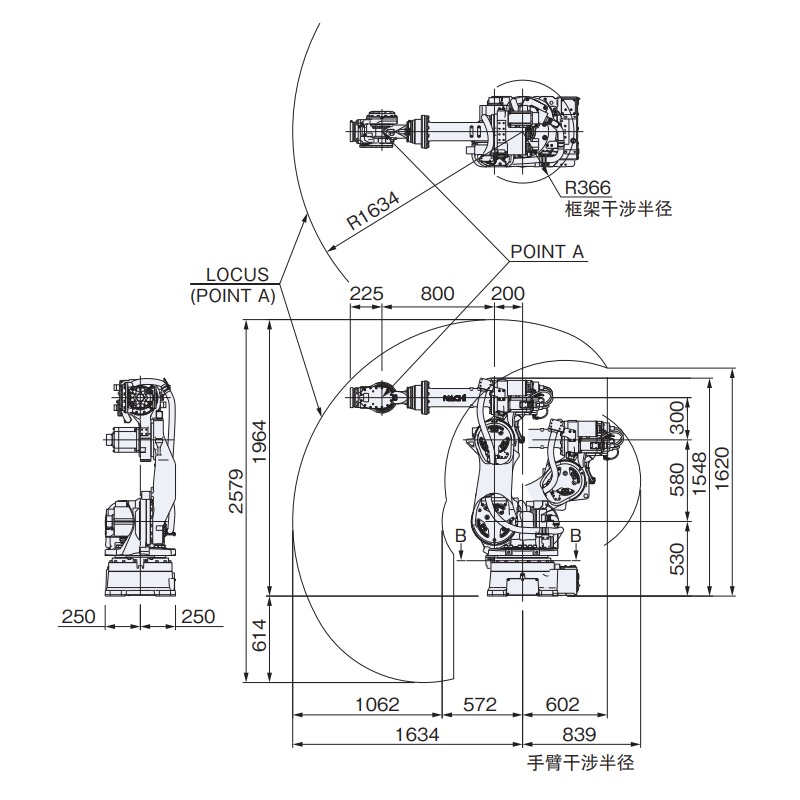
| 最大工作半径 | 2,071mm | 1,634mm | |||
| 位置反复精度 *3 | ±0.1mm | ||||
| 设置方法 | 地面安装 | ||||
| 设置条件 *4 | 周围温度 : 0~45°C | ||||
| 主体质量 | 690kg | 670kg | |||
1[rad]=180/π[°] 1[N·m]=1/9.8[kgf·m]
(*1) 可搭载于第1手臂(第3轴的手臂)上的负荷重量根据安装位置,手腕负荷重量会有变化。
(*2) 手腕容许惯性力矩可能因手腕的负荷条件而有差异,请注意。
(*3) 依据JIS B 8432。
(*4) 在海拔1,000m以下使用。超过容许高度时,周围温度受到限制。
工作范围
外形尺寸及动作范围
SRA100B-01
SRA100J-01
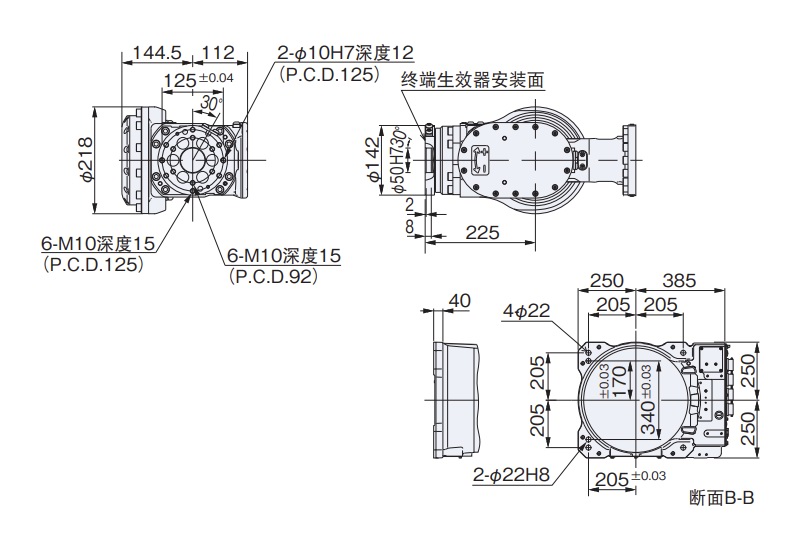
SRA100B/SRA100J通用 手腕部/安装部详情
●以上数据均来源于不二越内部实验,于特定测试环境下所得(请见各项具体说明)。
●本产品的额定功率、规格、外部尺寸等如需改良而变更,恕不另行通告。
Previous
